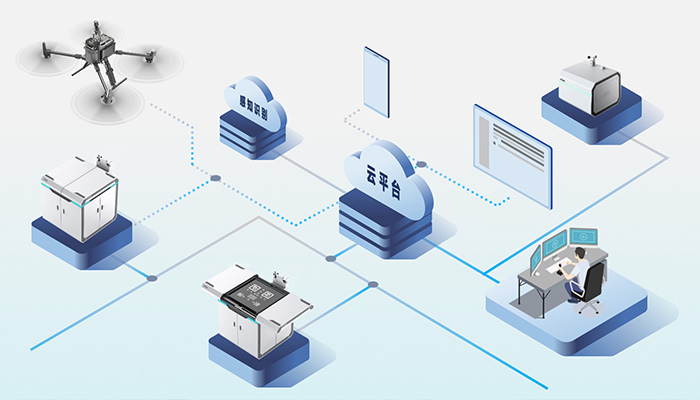









復(fù)亞光伏巡檢無人機(jī)是復(fù)亞智能旗下產(chǎn)品,搭配自主研發(fā)的智能任務(wù)管控控制平臺(tái)、無人機(jī)全自動(dòng)機(jī)場、無人機(jī)自動(dòng)飛行算法(飛行大腦)和組件熱斑診斷算法,形成光伏無人機(jī)全自動(dòng)巡檢系統(tǒng),該系統(tǒng)可提升光伏電站日常周界巡邏和面板巡檢效率,及時(shí)發(fā)現(xiàn)熱斑故障等問題,保障光伏電站高質(zhì)量安全運(yùn)行。

自動(dòng)飛行系統(tǒng)
軟件平臺(tái)

復(fù)亞光伏巡檢無人機(jī)是復(fù)亞智能旗下產(chǎn)品,搭配自主研發(fā)的智能任務(wù)管控控制平臺(tái)、無人機(jī)全自動(dòng)機(jī)場、無人機(jī)自動(dòng)飛行算法(飛行大腦)和組件熱斑診斷算法,形成光伏無人機(jī)全自動(dòng)巡檢系統(tǒng),該系統(tǒng)可提升光伏電站日常周界巡邏和面板巡檢效率,及時(shí)發(fā)現(xiàn)熱斑故障等問題,保障光伏電站高質(zhì)量安全運(yùn)行。
復(fù)亞光伏巡檢無人機(jī)以工業(yè)無人機(jī)為飛行平臺(tái),搭配自主研發(fā)的智能任務(wù)管控控制平臺(tái)、無人機(jī)全自動(dòng)機(jī)場、無人機(jī)自動(dòng)飛行算法(飛行大腦)和組件熱斑診斷算法,形成光伏無人機(jī)全自動(dòng)巡檢系統(tǒng),該系統(tǒng)可提升光伏電站日常周界巡邏和面板巡檢效率,及時(shí)發(fā)現(xiàn)熱斑故障等問題,保障光伏電站高質(zhì)量安全運(yùn)行。
系統(tǒng)優(yōu)勢
應(yīng)對(duì)光伏巡檢難題
大部分光伏發(fā)電站位于山區(qū)、沙漠、戈壁和草原等惡劣環(huán)境,占地面積廣且設(shè)備眾多。依靠傳統(tǒng)人工巡檢方式,不僅效率低下,而且面臨較高的安全風(fēng)險(xiǎn)。
光伏巡檢現(xiàn)狀:
1、周期長效率低:光伏電站占地面積大,人工巡檢效率低、周期長,可能導(dǎo)致設(shè)備故障得不到及時(shí)發(fā)現(xiàn)和處理,影響電站正常運(yùn)行。
2、巡檢盲區(qū)與局限性:人工巡檢受到視角和地形限制,存在盲區(qū),可能難以發(fā)現(xiàn)潛在問題。也可能因疲勞、經(jīng)驗(yàn)不足等原因?qū)е逻z漏或誤判。
3、存在安全隱患:在特殊地形和惡劣環(huán)境下,人工巡檢面臨較高的安全風(fēng)險(xiǎn),如山區(qū)、水面、高空、高溫作業(yè)等。
復(fù)亞光伏巡檢優(yōu)勢和應(yīng)用
無人機(jī)光伏自動(dòng)巡檢系統(tǒng),通過定期自動(dòng)巡檢、重點(diǎn)區(qū)域打卡式巡檢等多種任務(wù)形式,減少人工巡檢的工作量和風(fēng)險(xiǎn),對(duì)光伏面板進(jìn)行健康度巡查,及時(shí)提醒運(yùn)維人員進(jìn)行檢修,從而提高設(shè)備發(fā)電效能,提高光伏電站巡檢的效率與質(zhì)量,實(shí)現(xiàn)光伏電站穩(wěn)定、高效運(yùn)行。具有如下價(jià)值和優(yōu)勢:
1、高效自動(dòng)巡查。對(duì)場站范圍內(nèi)開展周期性自動(dòng)巡查,并可針對(duì)重點(diǎn)區(qū)域定期打卡式巡檢,可短時(shí)間內(nèi)完成大面積的巡檢任務(wù),及時(shí)發(fā)現(xiàn)和處理設(shè)備故障。
2、提高巡檢質(zhì)量。支持可見光、紅外等數(shù)據(jù)影像信息采集,可快速發(fā)現(xiàn)面板光斑,提高巡檢質(zhì)量,減少遺漏和誤判。
3、智能數(shù)據(jù)識(shí)別。巡檢數(shù)據(jù)自動(dòng)導(dǎo)入智能分析系統(tǒng),實(shí)現(xiàn)故障自動(dòng)識(shí)別和定位,準(zhǔn)確識(shí)別光伏組件熱斑(遮擋、破損、灰塵、二極管短路引起)等現(xiàn)象,輸出巡檢報(bào)告,指引運(yùn)維人員抵達(dá)損壞組件位置。
1.復(fù)亞無人機(jī)自動(dòng)機(jī)場,無需攜帶無人機(jī)通勤至作業(yè)現(xiàn)場,機(jī)場部署作業(yè)現(xiàn)場,實(shí)現(xiàn)存放、高精度自主起降、電池自動(dòng)充電換電等功能。
2.光伏自動(dòng)飛行算法,無需人工操控,無需作業(yè)經(jīng)驗(yàn),在復(fù)雜作業(yè)環(huán)境中實(shí)現(xiàn)無人機(jī)全自動(dòng)巡航、拍攝。
3.組件熱斑診斷算法,無需人工識(shí)別比對(duì),自動(dòng)發(fā)現(xiàn)熱斑并進(jìn)行精確定位,圖像實(shí)時(shí)傳輸?shù)皆贫耍?jīng)識(shí)別診斷后將數(shù)據(jù)報(bào)告給工作人員。
4.智能任務(wù)管控控制平臺(tái),多機(jī)場、多無人機(jī)的實(shí)時(shí)監(jiān)控和遠(yuǎn)程控制,可實(shí)現(xiàn)無人機(jī)航線創(chuàng)建、任務(wù)管理、實(shí)時(shí)顯示、遠(yuǎn)程遙控、飛行記錄、數(shù)據(jù)管理、設(shè)備臺(tái)賬管理、組織管理等功能。
自動(dòng)規(guī)劃航跡
選定需要巡檢的光伏區(qū)域,自動(dòng)規(guī)劃無人機(jī)的飛行航線,地面控制站(GCS)加載航線,無人機(jī)自動(dòng)飛行,執(zhí)行作業(yè)任務(wù)。
自動(dòng)起降換電
自動(dòng)機(jī)場就近部署在作業(yè)現(xiàn)場,自動(dòng)起飛,高精度視覺自動(dòng)降落。自動(dòng)進(jìn)行電池更換,支持高頻作業(yè),三分鐘即可再次起飛作業(yè)。
自動(dòng)熱斑識(shí)別
通過分析無人機(jī)采集的光伏熱成像照片,自動(dòng)發(fā)現(xiàn)熱斑并進(jìn)行精確定位,方便運(yùn)維人員檢修查看。
無人機(jī)光伏自動(dòng)巡檢系統(tǒng),既能為場站提供安防巡邏,也能對(duì)光伏面板進(jìn)行健康度巡查,提醒運(yùn)維人員進(jìn)行檢修,提高設(shè)備發(fā)電效能。
步驟一:電站航測及組件標(biāo)定。對(duì)整個(gè)電站進(jìn)行航測建模,構(gòu)建電站二維正射影像,對(duì)組件的標(biāo)定、編號(hào)。
步驟二:航線設(shè)計(jì)及任務(wù)規(guī)劃。設(shè)計(jì)組件巡檢航線,對(duì)航線進(jìn)行安全性驗(yàn)證后,設(shè)置無人機(jī)巡檢作業(yè)計(jì)劃。
步驟三:無人值守及自動(dòng)巡檢。無人機(jī)按照作業(yè)計(jì)劃,從自動(dòng)機(jī)場自主起飛,運(yùn)用可見光/紅外相機(jī)執(zhí)行巡檢任務(wù)。
步驟四:數(shù)據(jù)回傳及自動(dòng)處理。實(shí)時(shí)回傳巡檢視頻,無人機(jī)作業(yè)完成后將采集的作業(yè)照片上傳至缺陷檢測系統(tǒng)分析,并生成巡檢報(bào)告。




免費(fèi)預(yù)約演示
 全自動(dòng)飛行任務(wù)選擇與執(zhí)行
自動(dòng)機(jī)場的操控與監(jiān)控
自動(dòng)飛行任務(wù)下的數(shù)據(jù)采集
無人機(jī)自動(dòng)回庫后進(jìn)行充電或換電
自動(dòng)巡查任務(wù)的回放,圖像數(shù)據(jù)的查閱
全自動(dòng)飛行任務(wù)選擇與執(zhí)行
自動(dòng)機(jī)場的操控與監(jiān)控
自動(dòng)飛行任務(wù)下的數(shù)據(jù)采集
無人機(jī)自動(dòng)回庫后進(jìn)行充電或換電
自動(dòng)巡查任務(wù)的回放,圖像數(shù)據(jù)的查閱
添加官方客服

我們的工作時(shí)間是工作日9:00~17:30
期待與您溝通并提供您所需的支持或方案,謝謝!
 行業(yè)方案與產(chǎn)品報(bào)價(jià)
相關(guān)場景案例資料
復(fù)亞自動(dòng)飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報(bào)價(jià)
相關(guān)場景案例資料
復(fù)亞自動(dòng)飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報(bào)價(jià)
相關(guān)場景案例資料
復(fù)亞自動(dòng)飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報(bào)價(jià)
相關(guān)場景案例資料
復(fù)亞自動(dòng)飛行系統(tǒng)功能
靈活的商務(wù)合作模式

復(fù)亞智能是業(yè)內(nèi)領(lǐng)先的無人機(jī)全自動(dòng)飛行系統(tǒng)研發(fā)和服務(wù)商,用高度智能的自動(dòng)飛行系統(tǒng)滿足政企用戶低空巡查業(yè)務(wù)需求,分布式部署的無人機(jī)機(jī)場,讓巡邏干預(yù)隨時(shí)可達(dá),巡檢數(shù)據(jù)觸手可及。
投資郵箱:invest@foiadrone.com
媒體合作:BD@foiadrone.com
微信客服
周一至周五:9:00-17:30







友情鏈接:
?2023 上海復(fù)亞智能技術(shù)發(fā)展有限公司版權(quán)所有 備案號(hào):滬ICP備2023002692號(hào)
法律聲明 | 隱私政策 | 網(wǎng)站地圖

掃碼關(guān)注